Estimation Filters
Sensor Fusion and Tracking Toolbox™ provides estimation filters that are optimized for specific scenarios, such as linear or nonlinear motion models, linear or nonlinear measurement models, or incomplete observability.
Functions
Topics
- Introduction to Estimation Filters
General review of estimation filters provided in the toolbox.
- Linear Kalman Filters
Estimate and predict object motion using a Linear Kalman filter.
- Extended Kalman Filters
Estimate and predict object motion using an extended Kalman filter.
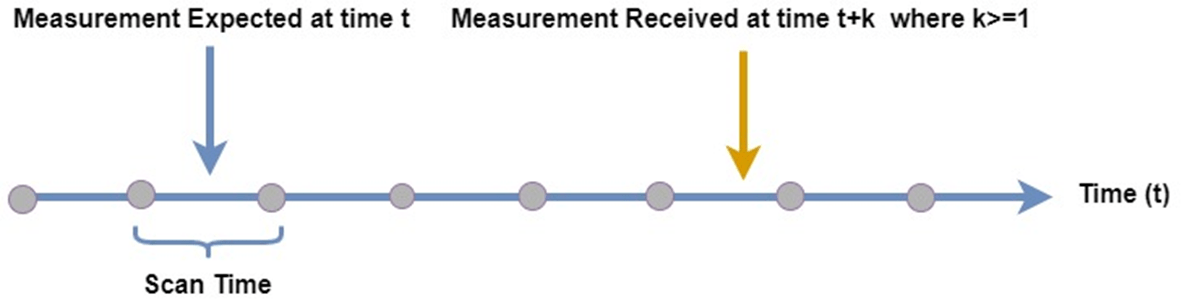
- Introduction to Out-of-Sequence Measurement Handling
Definition of out-of-sequence measurement and techniques of handling OOSM.
- Motion Model, State, and Process Noise
Introduce kinematic motion model, state, and process noise conventions.
- Generate Code with Strict Single-Precision and Non-Dynamic Memory Allocation
Introduce functions, objects, and blocks that support strict single-precision and non-dynamic memory allocation code generation in Sensor Fusion and Tracking Toolbox.
Featured Examples
You can also select a web site from the following list:
Americas
- América Latina (Español)
- Canada (English)
- United States (English)
Europe
- Belgium (English)
- Denmark (English)
- Deutschland (Deutsch)
- España (Español)
- Finland (English)
- France (Français)
- Ireland (English)
- Italia (Italiano)
- Luxembourg (English)
- Netherlands (English)
- Norway (English)
- Österreich (Deutsch)
- Portugal (English)
- Sweden (English)
- Switzerland
- United Kingdom (English)