Field-Weakening Control
Develop field-weakening control for a permanent magnet synchronous motor (PMSM)
Develop field-weakening control for a permanent magnet synchronous motor (PMSM)
Design and implement motor control algorithms
Field-weakening or flux-weakening is a technique for increasing the speed of an electric motor above its rating at the expense of reduced torque. Field-weakening is used for motor control in automation applications and traction motor control for electric vehicles and locomotives to achieve higher motor speed when lower torque is acceptable.
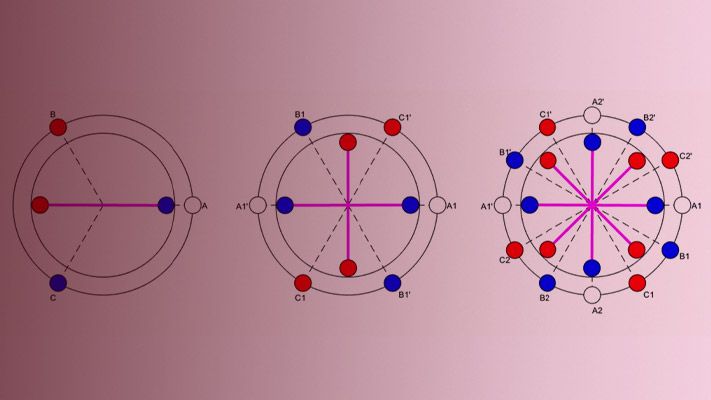
The permanent magnet synchronous motor (PMSM) is popular in these applications because of its high power density, high speed, and fast dynamic response. However, PMSM speed is limited when the stator terminal voltage reaches the inverter output limit. Therefore, a PMSM requires field-weakening to increase its shaft speed above its design rating. One approach to achieve higher motor speed is to regulate the inverter power electronics to manipulate the stator d- and q-axis currents to counter the magnetic airgap flux generated by the rotor magnets.
Field-weakening control involves reducing the resulting d-axis flux,\(\lambda_{d}\), by lowering the effect of the resulting air-gap flux linkage associated with the permanent magnets,\(\lambda_{pm}\). This is done by driving the component of the magnetizing d-axis stator current negative in the PMSM as shown in Figure 1 below.
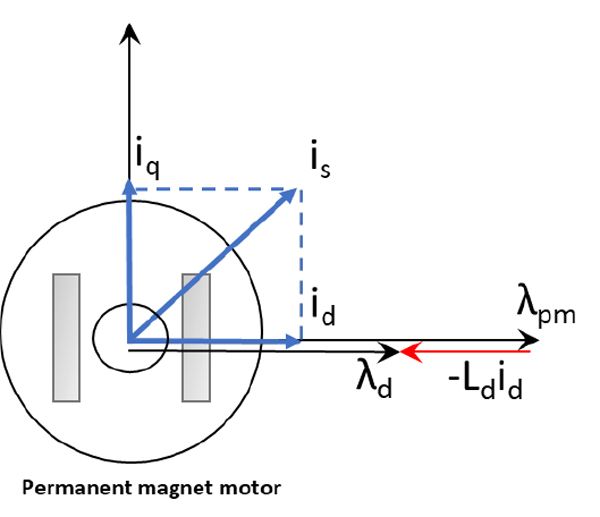
Fig. 1 Vector representation of resulting d-axis flux, λd
The torque speed characteristic curve in Figure 2 shows that the motor’s back EMF (stator voltage) rises in proportion to the motor speed. This behavior occurs in the constant torque region of the PMSM, where field-oriented control (FOC) is an accepted way to regulate the motor. However, when the speed continues to rise, the applied voltage reaches maximum and the back EMF voltage exceeds the applied voltage, preventing the motor speed from increasing. To increase the motor speed above its base speed, field-weakening mode is used while maintaining a constant output power, which is the product of torque and motor speed. During field-weakening, the motor can rotate faster at the maximum available voltage, at the expense of reduced maximum torque.
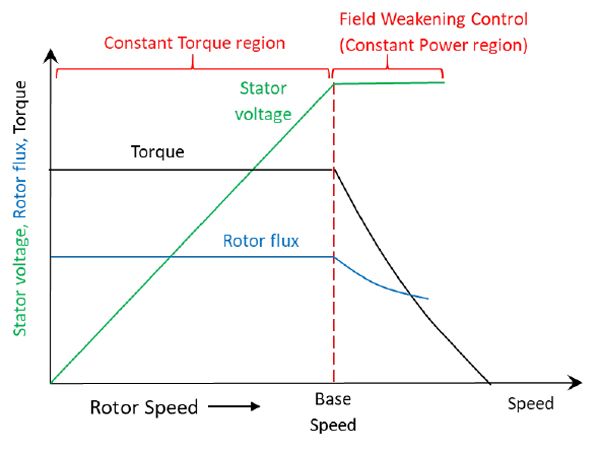
Fig. 2 Torque and speed characteristic of PMSMs
Figure 3 illustrates the field-weakening control operation as the intersection of the voltage limit ellipse and the current limit circle on the left-hand side of the stator currents (id, iq) plane.
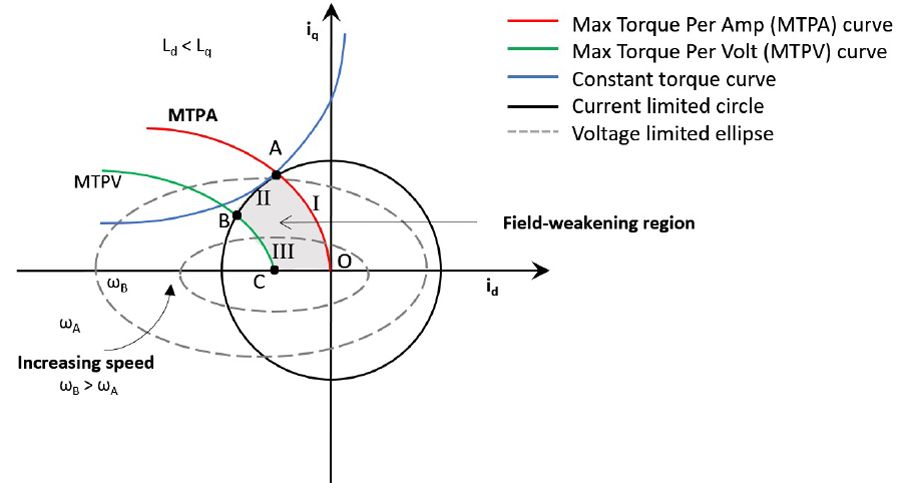
Fig. 3 Voltage and current limit of a PMSM
To understand field-weakening, the current vector trajectories can be evaluated using trajectories that bound the field-weakening region OABC. Trajectory I along OA is the maximum torque per ampere (MTPA) curve, where MTPA can be achieved by manipulating the current vector trajectory to match the OA curve. Trajectory II follows the current limit circle from A to B. The current limit is defined by the constraints of the DC bus and power electronics. Trajectory III represents deep field-weakening along BC, the maximum torque per volt (MTPV) curve. During MTPV operation, the motor generates the maximum speed and torque allowed within the voltage constraint ellipse, which is bounded by the DC bus. Regardless of the torque transient response, the optimized field-weakening trajectories or operating points are always located within the grey area.
Figure 4 shows the system-level block diagram for field-weakening control of a PMSM in Simulink®. The outer speed control loop generates a torque command as an input for the MTPA field-weakening control block. The inner current loop is composed of Clarke and Park transformations and a space vector generator.
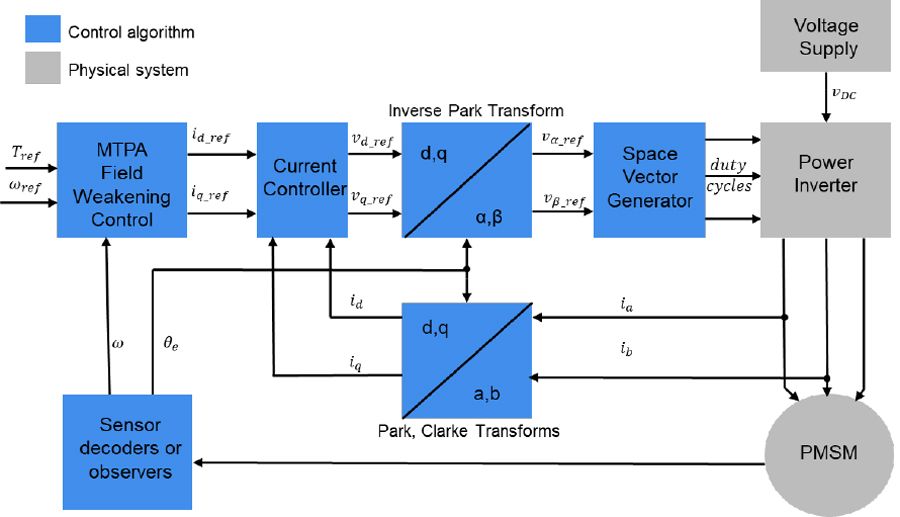
Fig. 4 Overview of PMSM field-weakening control
Motor Control Blockset™ provides reference examples showing field-weakening control, and code generation deployment to help you implement field-weakening control using Simulink.
To learn more about how to design and implement motor control algorithms, see Motor Control Blockset and Simscape Electrical™.

Go from basic tasks to more advanced maneuvers by walking through interactive examples and tutorials.

The bat365 community for students, researchers, and engineers using Simulink to apply power electronics control to Electric Vehicles, Renewable Energy, Battery Systems, Power Conversion, and Motor Control.

30 days of exploration at your fingertips.

Understanding BLDC Motor Control Algorithms
Read ebookYou can also select a web site from the following list